部分研究展示
![]()
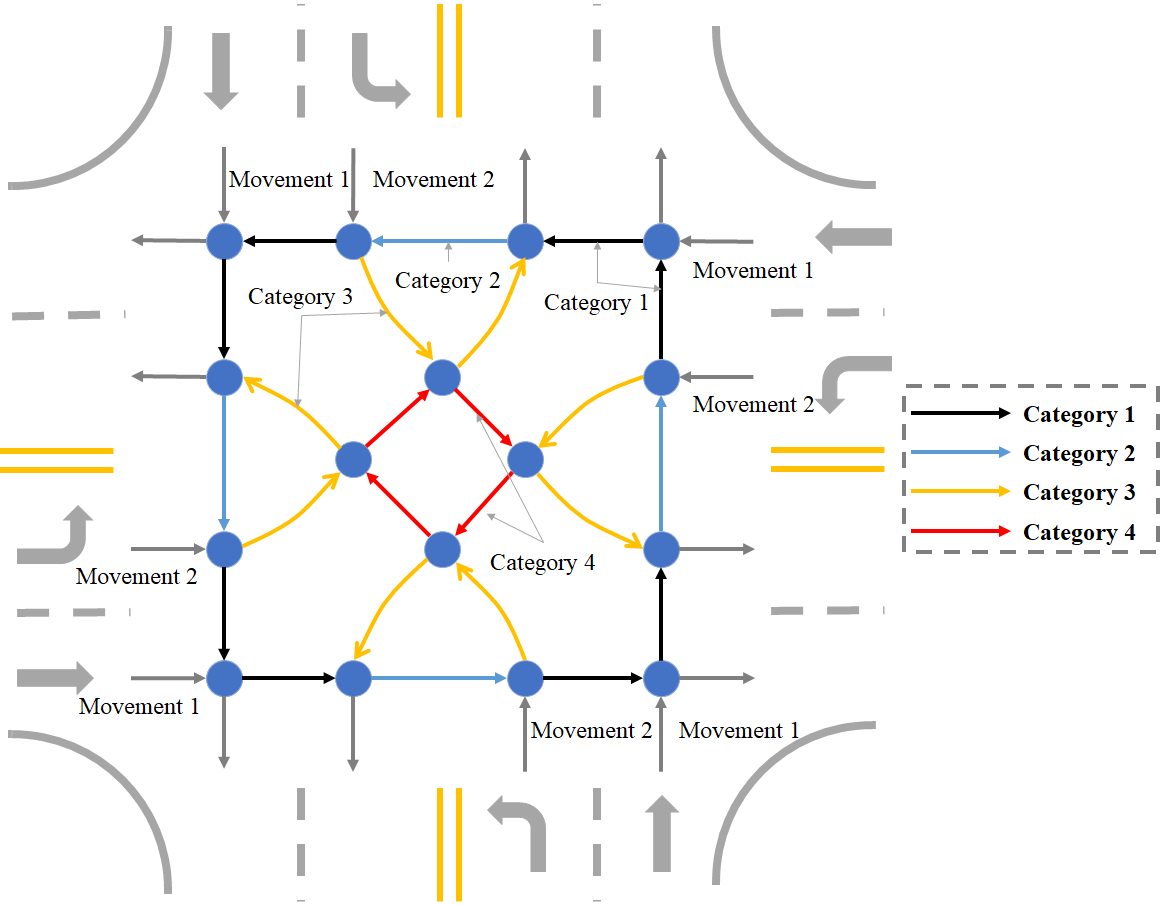
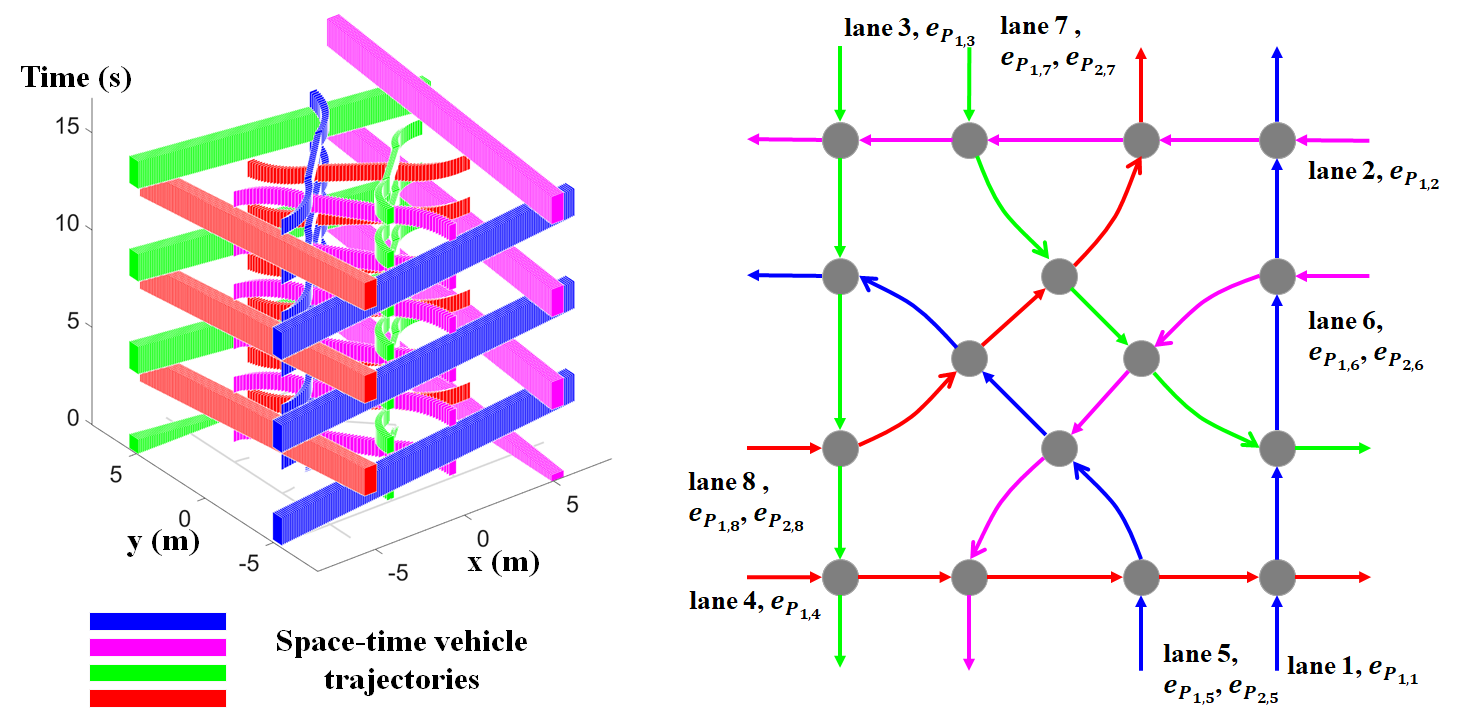
在自动驾驶环境下,本研究在传统信号灯相位的基础上提出了“细粒度相位”的概念,构建了车道几何设计与车辆控制策略的联合设计框架,给出了车辆平均延误与路口通行能力的理论分析,并在理论分析结果的基础上设计了简便易行的相位选择机制;数值实验表明细粒度相位控制能够显著地降低车辆平均延误,并提升交叉口的通行能力。
 010-62785569
010-62785569Copyright © 2009-2011,www.thu-lead.com,All rights reserved
版权所有 © THU-LEAD交通科学实验室 未经许可 严禁复制
