Part of the research results
![]()
Network-level traffic control for connected automated vehicles
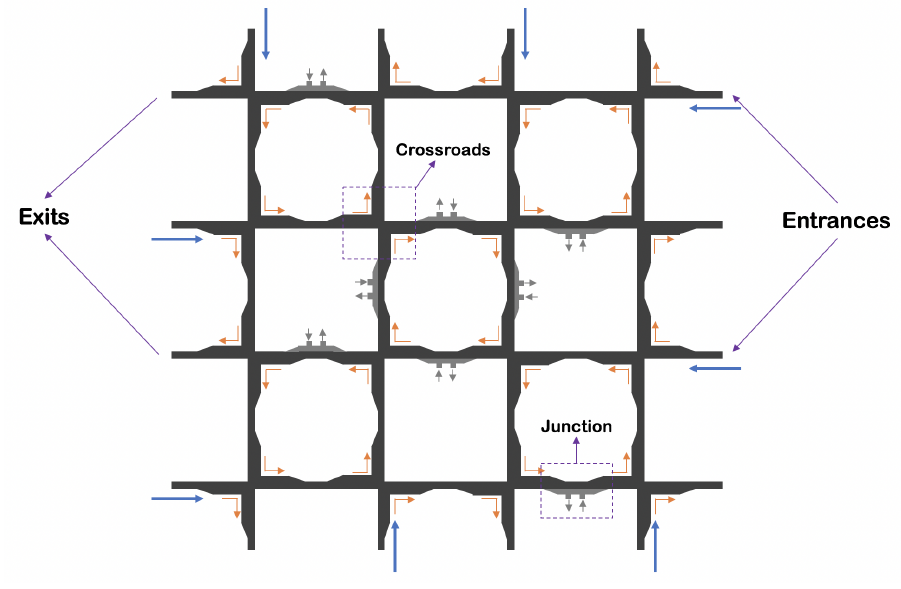
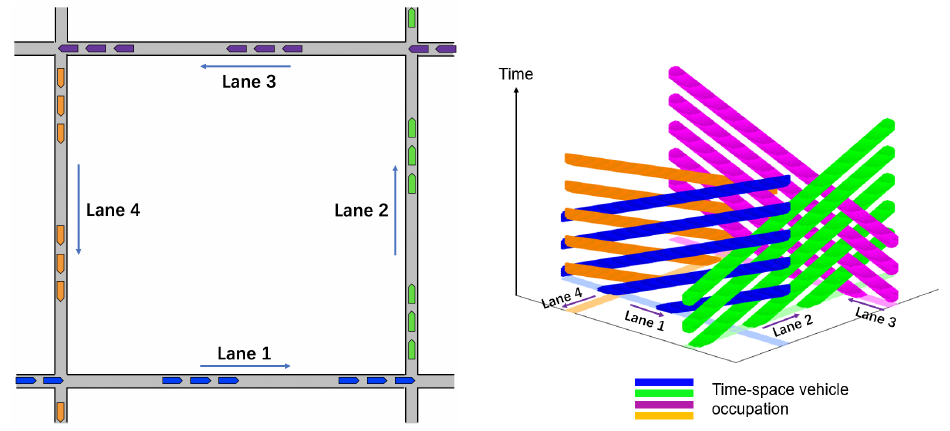
1. Space-time routing in dedicated automated vehicle zones
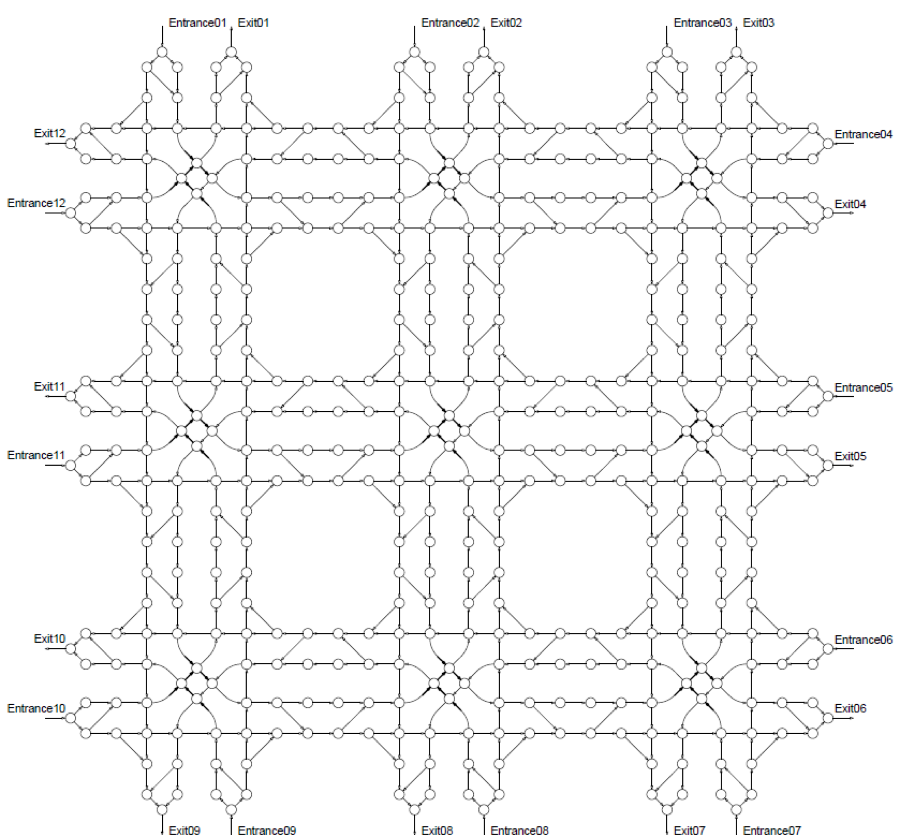
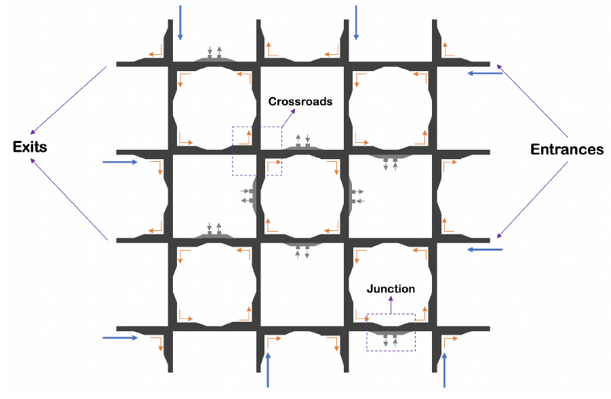
This study proposes a space-time routing framework applicable in dedicated automated vehicle (AV) zones. We establish a node-based conflict point network to model realistic road networks, and at each conflict point, we record the space-time occupations of AVs in continuous timelines. Then, based on the conflict point network, we develop two space-time routing algorithms for each AV once it enters the dedicated AV zone to minimize its trip travel time while maintaining the non-collision insurances; these two algorithms can trade-off between solution quality and computational load.
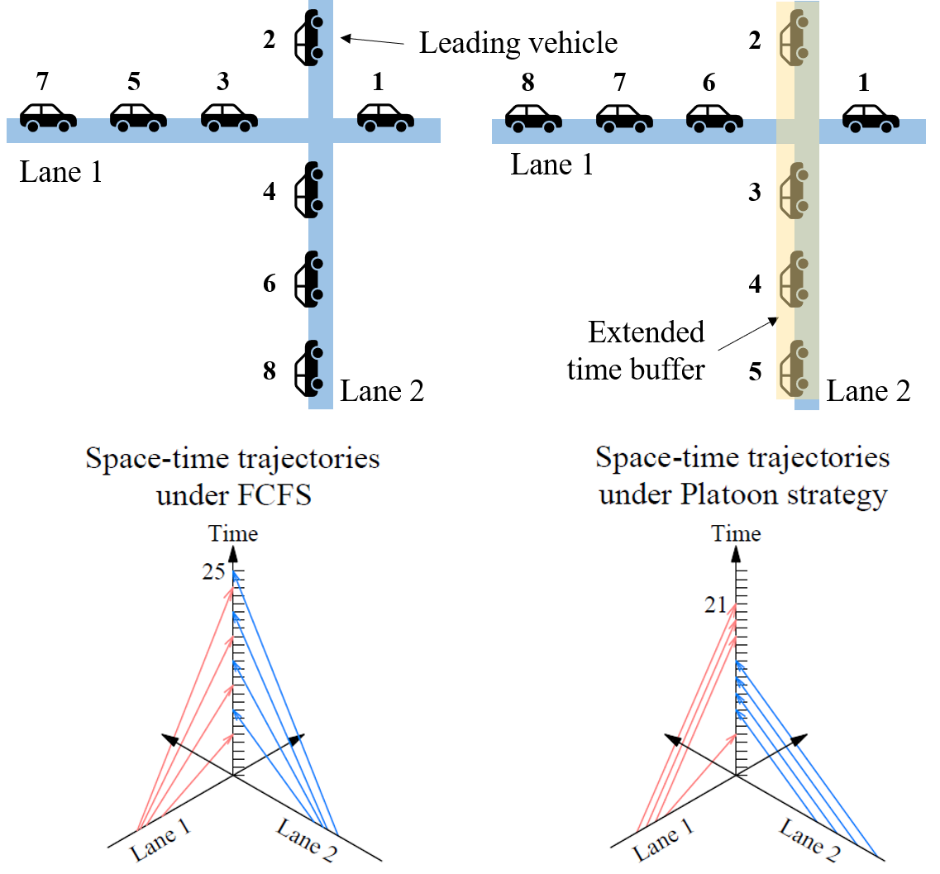
2. Coordinated vehicle itinerary planning and cyclic traffic control in connected automated vehicle zones
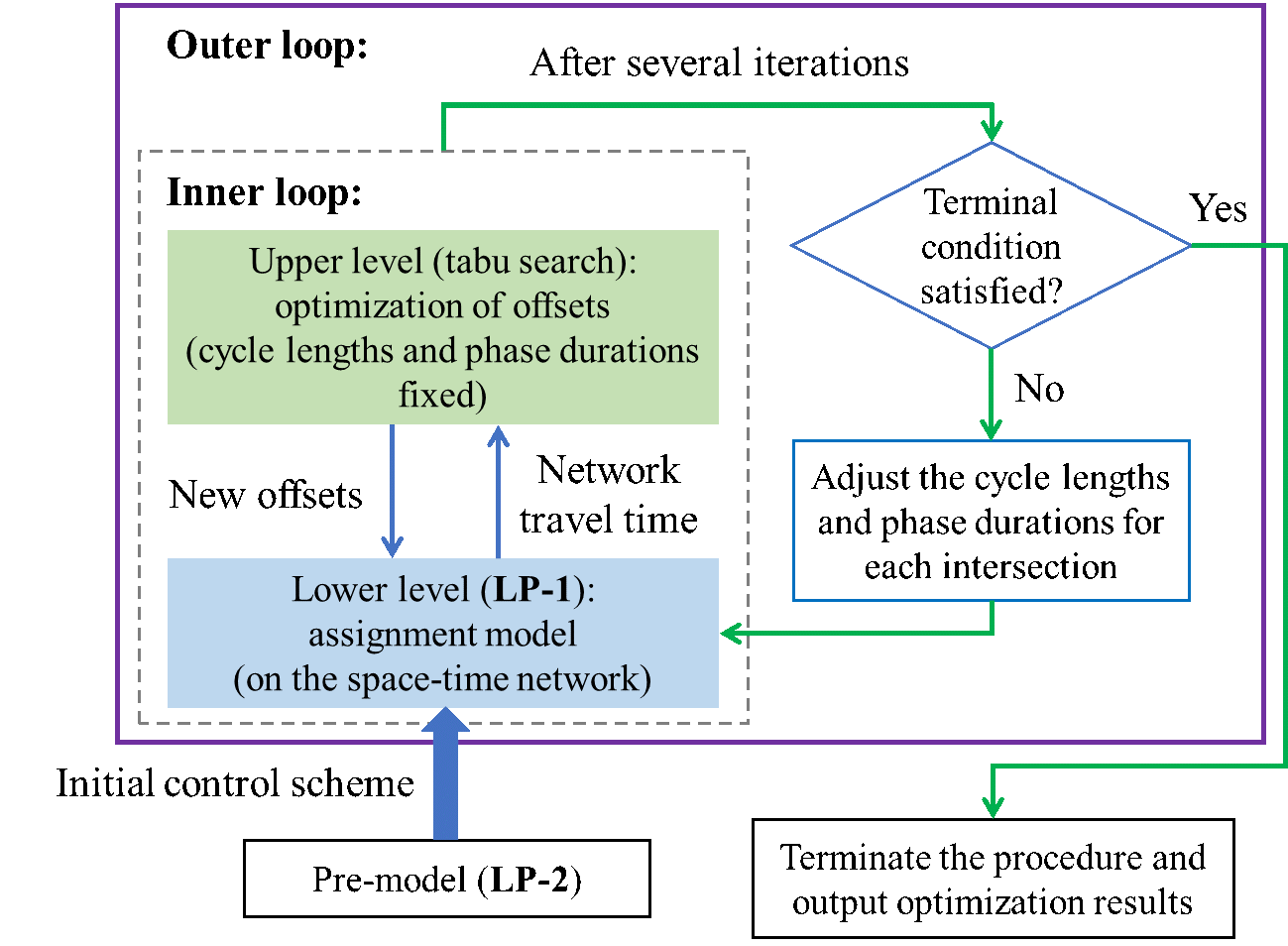
Combining the idea of network traffic coordination with centralized connected automated vehicle (CAV) control, we propose a network-level cyclic control framework to jointly optimize CAV movements and traffic control scheme. CAV movements in the network are planned in space-time dimension, which are called “itinerary” and used for vehicle guidance and instruction at key points along the trip.
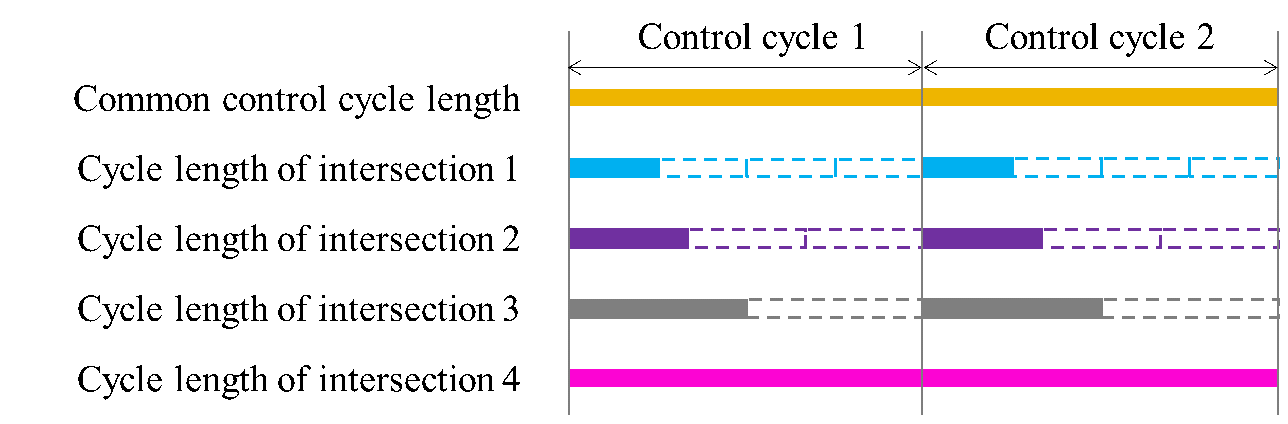
3. Rhythmic control of automated vehicles: Grid Network Rhythm and Online Routing
This study proposes a novel network-level real-time traffic control framework for connected automated vehicles (CAVs) on grid networks. The proposed framework integrates a rhythmic control method with an online routing algorithm to realize collision-free control of all CAVs on a network and achieve superior performance in average vehicle delay, network traffic throughput, and computational scalability.
 010-62785569
010-62785569Copyright © 2009-2011,www.thu-lead.com,All rights reserved
版权所有 © THU-LEAD交通科学实验室 未经许可 严禁复制
