Part of the research results
![]()
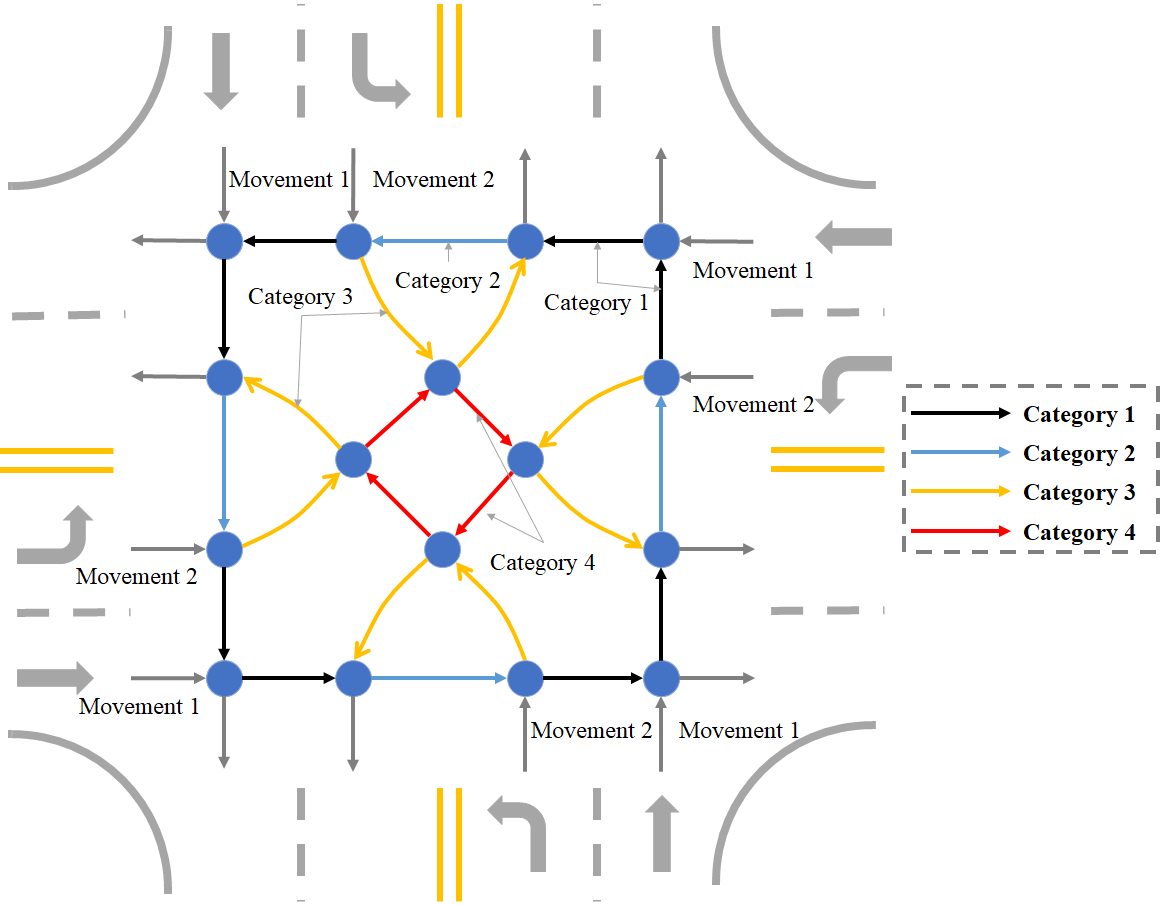
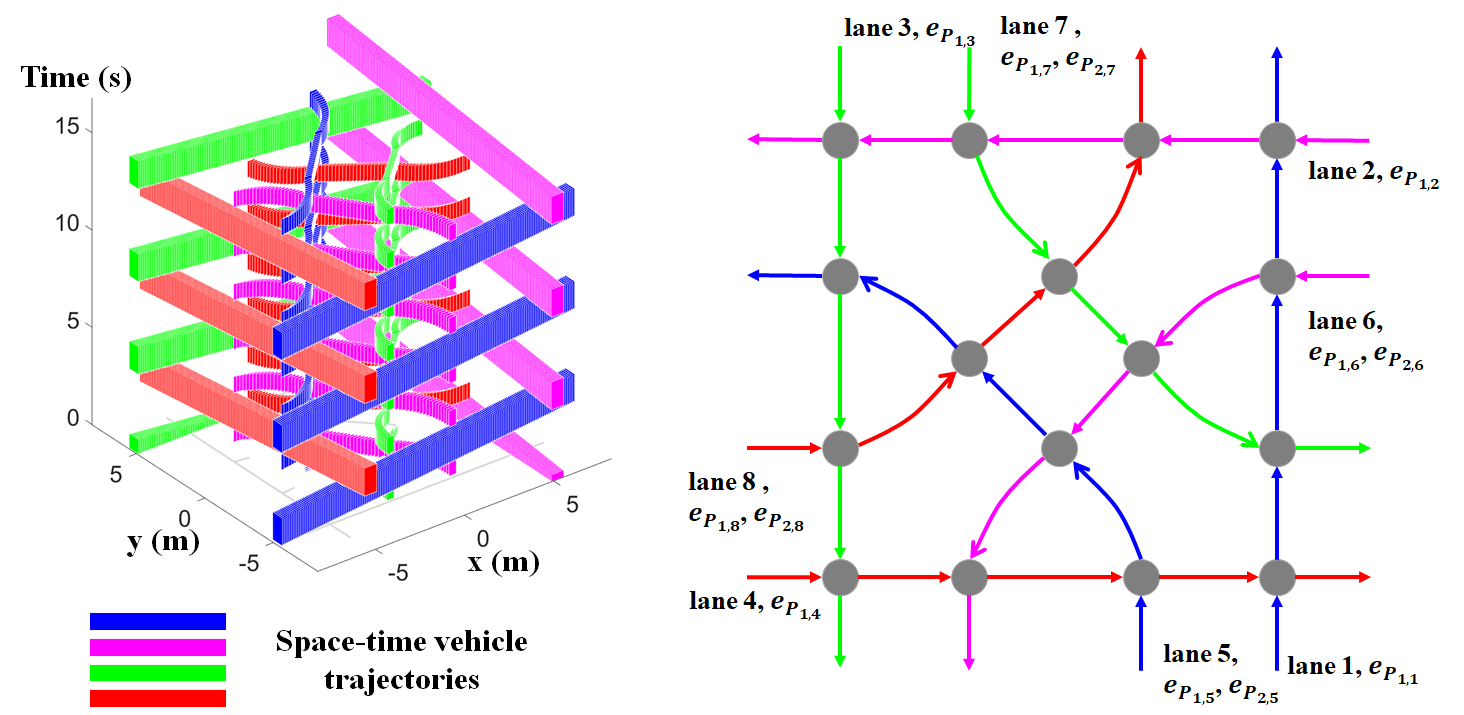
In the autonomous driving environment, the concept of "fine-grained phase" is proposed on the basis of the traditional signal light phase, and the joint design framework of lane geometry design and vehicle control strategy is constructed. The theoretical analysis of average vehicle delay and crossing capacity is given, and based on the theoretical analysis results, a simple and easy phase selection mechanism is designed. Numerical experiments show that fine-grained phase control can significantly reduce the average vehicle delay and improve the capacity of intersections.
 010-62785569
010-62785569Copyright © 2009-2011,www.thu-lead.com,All rights reserved
版权所有 © THU-LEAD交通科学实验室 未经许可 严禁复制
