部分研究展示
![]()
自动驾驶网络交通控制
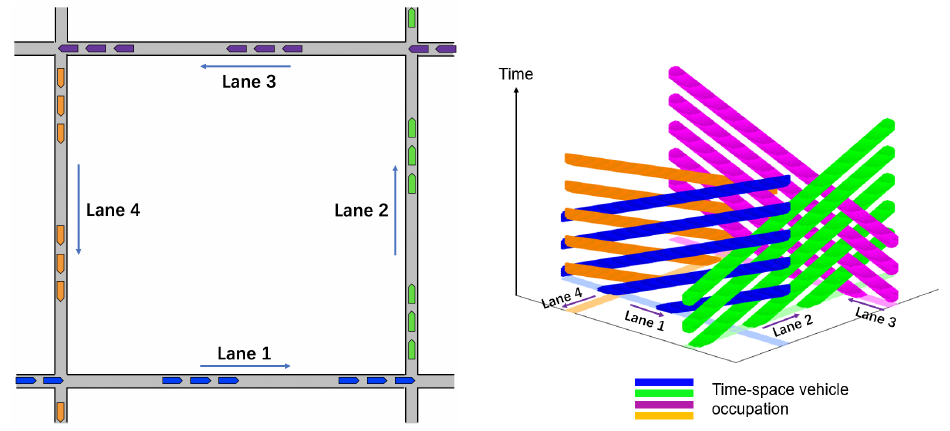
(一)特定自动驾驶区域内的无冲突时空路径规划
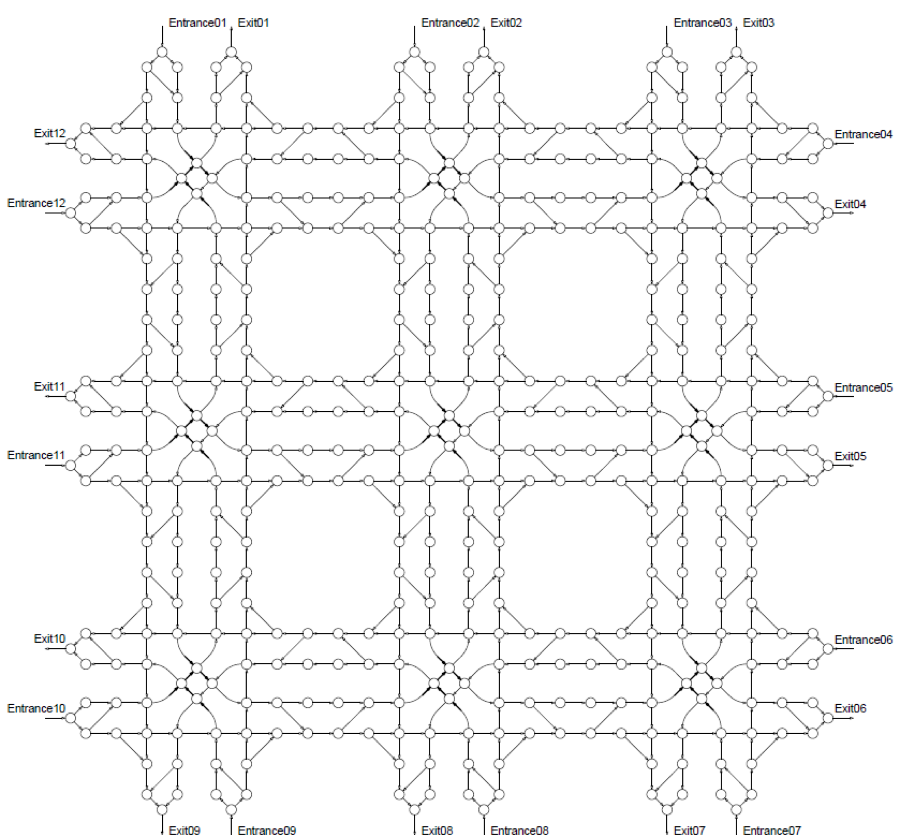
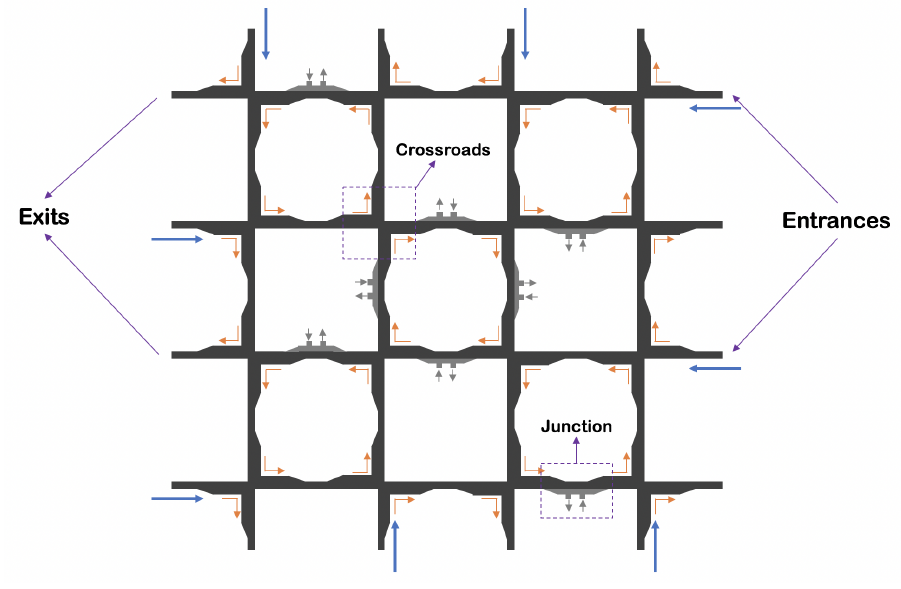
本项研究提出了适用于专用自动驾驶区域的时空路径规划框架。建立了一个基于节点的冲突点网络以对实际道路网络进行建模,并且在每个冲突点处记录连续时间轴上的自动驾驶车辆时空占用。基于冲突点网络,设计了两种时空路径规划算法,保证非冲突的同时最 大程度地减少车辆旅行时间,可以在降低车辆延误及降低计算复杂度之间进行权衡。
(二)网联自动驾驶区域内的车辆行程与交通控制协同优化
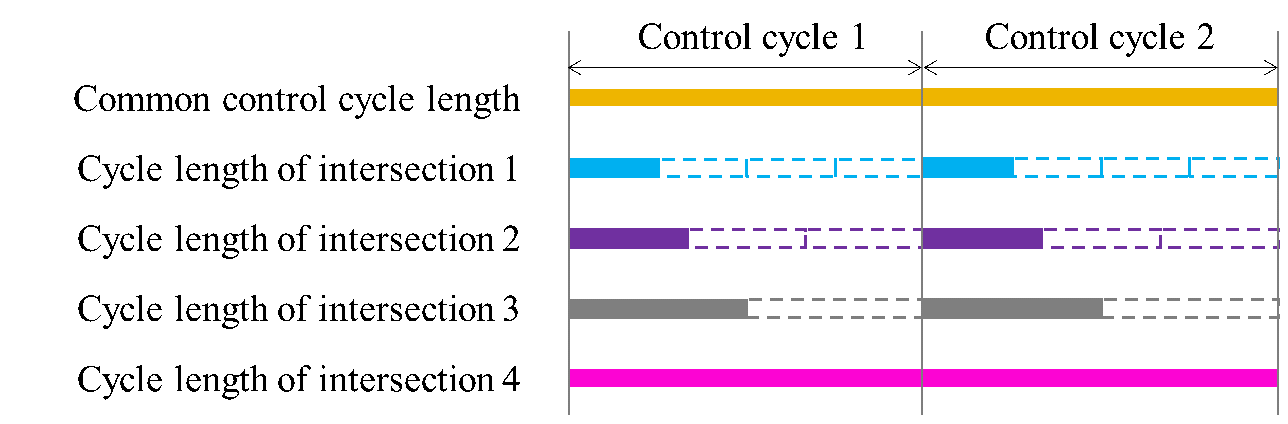
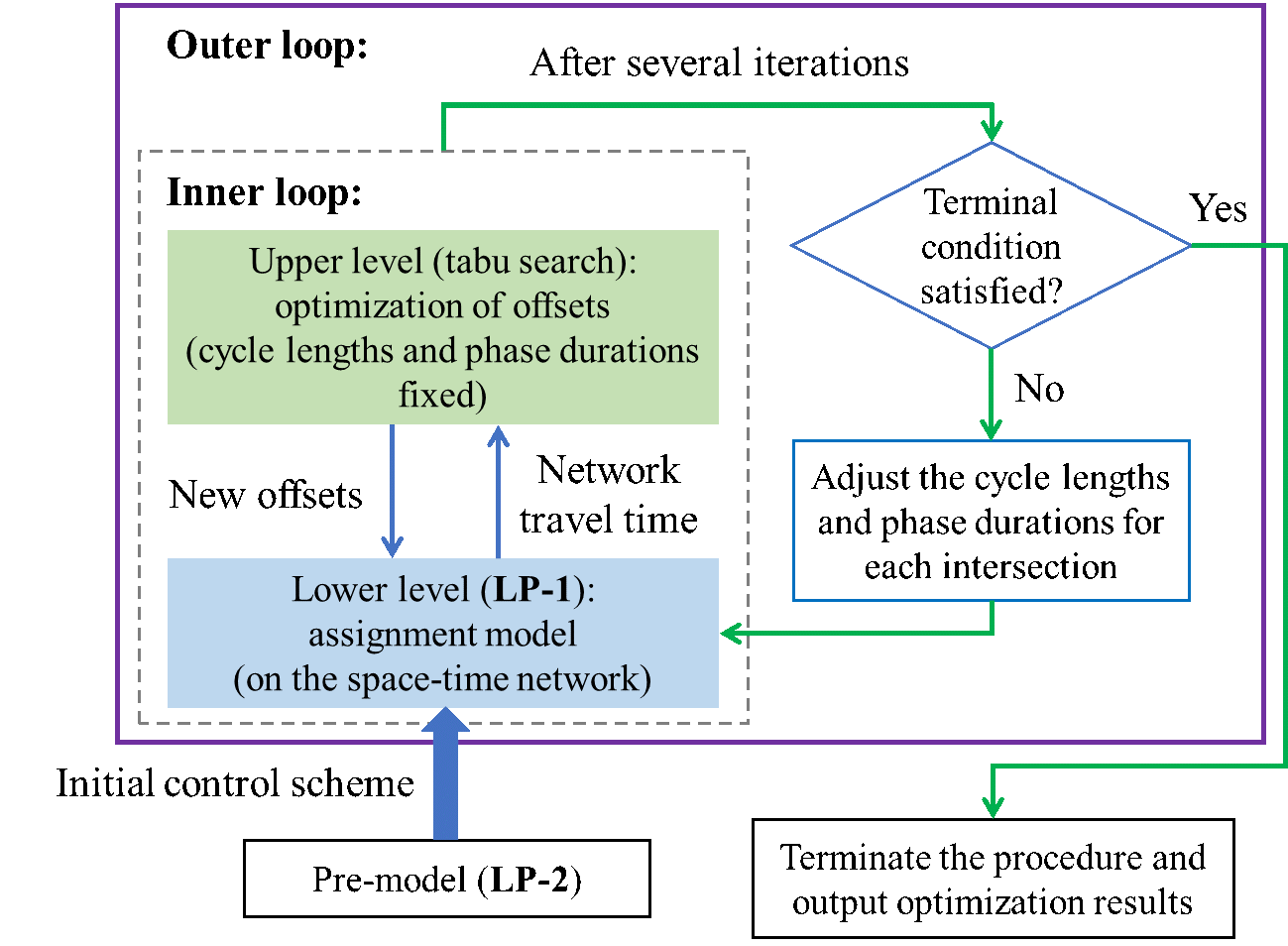
将网络流量协调思想与网联自动车辆的中心式控制相结合,提出了一个网络级循环控制框架,以联合优化网联自动车辆的运动和流量控制方案。网联自动车辆在网络中的运动是在时空维度上进行规划的,被称为“行程”,用于在行程中的关键点进行车辆引导和指导。
(三)面向网联自动驾驶车辆的“节奏式”控制与在线路径规划
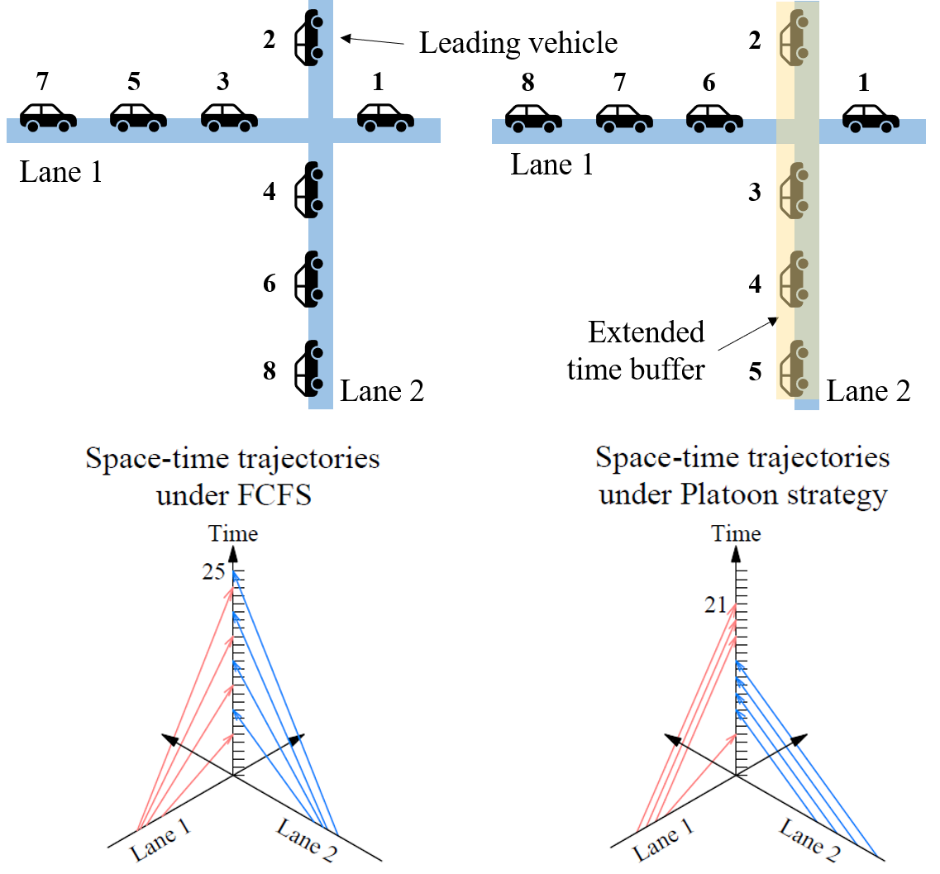
本项研究提出了一种新的基于网格的网联自动驾驶车辆网络级实时流量控制框架。该框架将“节奏式”控制方法与在线路径规划算法相结合,实现对网络上所有车辆的无碰撞控制,并在平均车辆延迟、网络流量吞吐量和计算可扩展性方面获得优异的性能。
 010-62785569
010-62785569Copyright © 2009-2011,www.thu-lead.com,All rights reserved
版权所有 © THU-LEAD交通科学实验室 未经许可 严禁复制
